Con il vigoroso sviluppo dell'industria elettronica, il rilevamento della posizione di alcuni componenti strutturali cambia lentamente dalla misurazione con contatto originale alla misurazione senza contatto attraversoSensore di posizione Hall e magnete. Come possiamo scegliere un magnete adatto in base ai nostri prodotti e alla nostra struttura? Qui facciamo alcune semplici analisi.
Innanzitutto dobbiamo determinare il materiale del magnete. Attualmente, il magnete samario-cobalto e il boro-ferro-neodimio sono ampiamente utilizzati nei sensori di posizione Hall. La differenza principale tra i due magneti è che, a parità di volume, i magneti NdFeB sono più forti dei magneti samario-cobalto; l'escursione termica del samario cobalto è inferiore a quella del Nd-Fe-B; la resistenza all'ossidazione del samario cobalto è maggiore di quella del Nd-Fe-B, ma generalmente è presente un rivestimento all'esterno del magnete, che può risolvere il problema dell'ossidazione; il magnete in samario-cobalto ha una migliore resistenza alla temperatura rispetto al magnete NdFeB, ma il valore di resistenza alla temperatura per entrambi i materiali magnetici può raggiungere più di 200 ℃. Pertanto, quando si seleziona il tipo di magnete, dovremmo valutarlo in combinazione con il rapporto costo-prestazioni, la temperatura di lavoro e l'ambiente di lavoro. In generale, il NdFeB può essere utilizzato maggiormente, soprattutto perché presenta le migliori caratteristiche di campo magnetico. Tuttavia, quando si lavora in un ampio intervallo di temperature, si consiglia di scegliere il magnete in samario-cobalto a causa della sua piccola deriva termica.
Inoltre, dobbiamo determinare alcuni parametri fondamentali del magnete. In base alle informazioni sulla posizione del test e alla direzione di movimento dell'oggetto, determiniamo se la direzione di magnetizzazione del magnete è diametrale o assiale. Inoltre, viene determinato se selezionare amagnete quadratoo amagnete cilindricoin base alla struttura di installazione. Naturalmente a volte è necessario personalizzare la forma del magnete in base alla struttura. C'è un altro fattore di requisito relativo al flusso magnetico, che è sempre stata la nostra preoccupazione nella selezione dei magneti. Bisogna infatti analizzarlo nei seguenti due aspetti:
1. L'intensità del campo magnetico indotto dal sensore di posizione Hall stesso e l'intervallo del campo magnetico indotto in ciascuna direzione saranno chiaramente indicati nel registro dati del sensore.
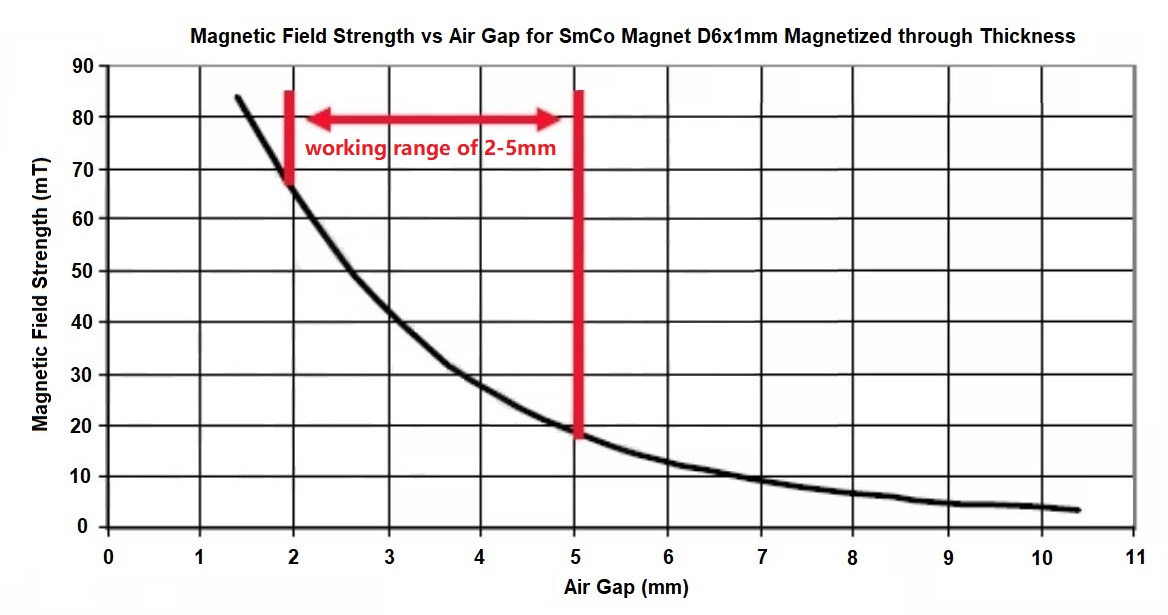
2. La distanza tra il magnete e il sensore stesso è generalmente determinata dalla struttura del prodotto. In base ai due aspetti precedenti e alla curva di variazione del campo magnetico nella figura seguente come esempio, possiamo determinare l'intensità del campo magnetico del magnete richiesto.
Infine, dobbiamo capire che ciò non significa che finché il campo magnetico rientra nei requisiti di portata del sensore, il magnete può essere altrettanto lontano dal sensore. Sebbene il sensore stesso abbia una funzione di calibrazione, dobbiamo capire che quando il magnete è troppo lontano dal sensore, la distribuzione del campo magnetico stesso è difficile da garantire la linearità o si avvicina alla linearità. Ciò significa che con il cambiamento di posizione e la distribuzione non lineare del campo magnetico stesso, la misurazione del sensore diventerà complessa e la calibrazione diventerà molto complessa, tanto che il prodotto non avrà riducibilità.
Quanto sopra è solo una semplice analisi della selezione dei magneti nelle applicazioni dei sensori Hall. Speriamo che ti sia utile. Se hai altre domande durante il processo di sviluppo, contattaci,Magnetismo dell'orizzonte di Ningbo. Possiamo effettuare ulteriori comunicazioni e fornirvi supporto tecnico.
Orario di pubblicazione: 12 agosto 2021